

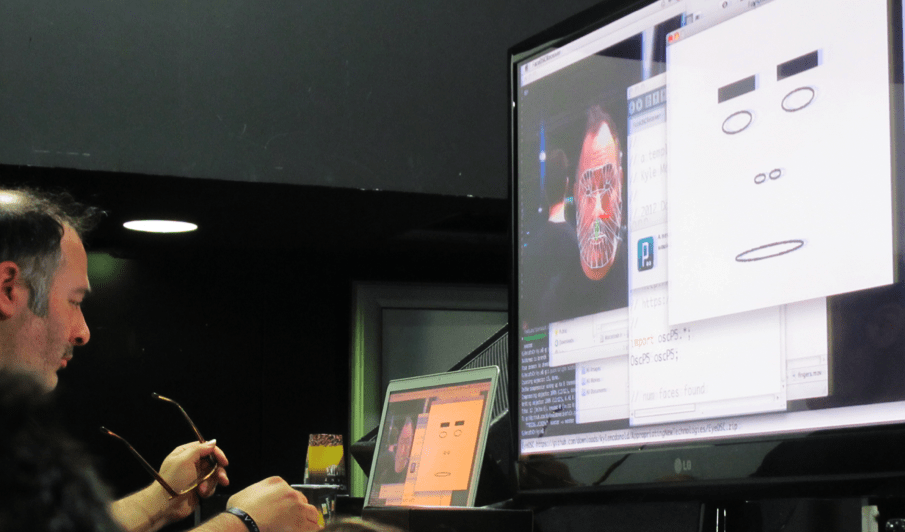
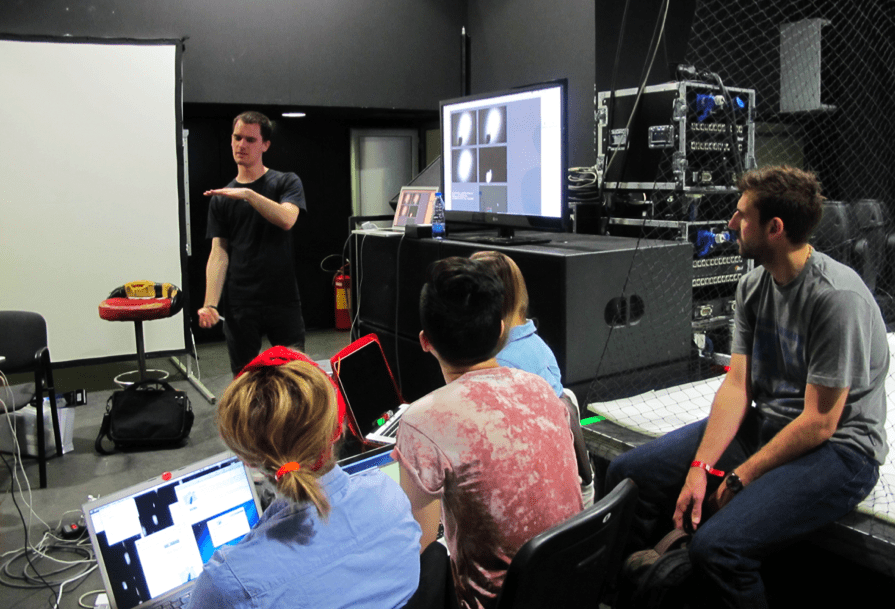
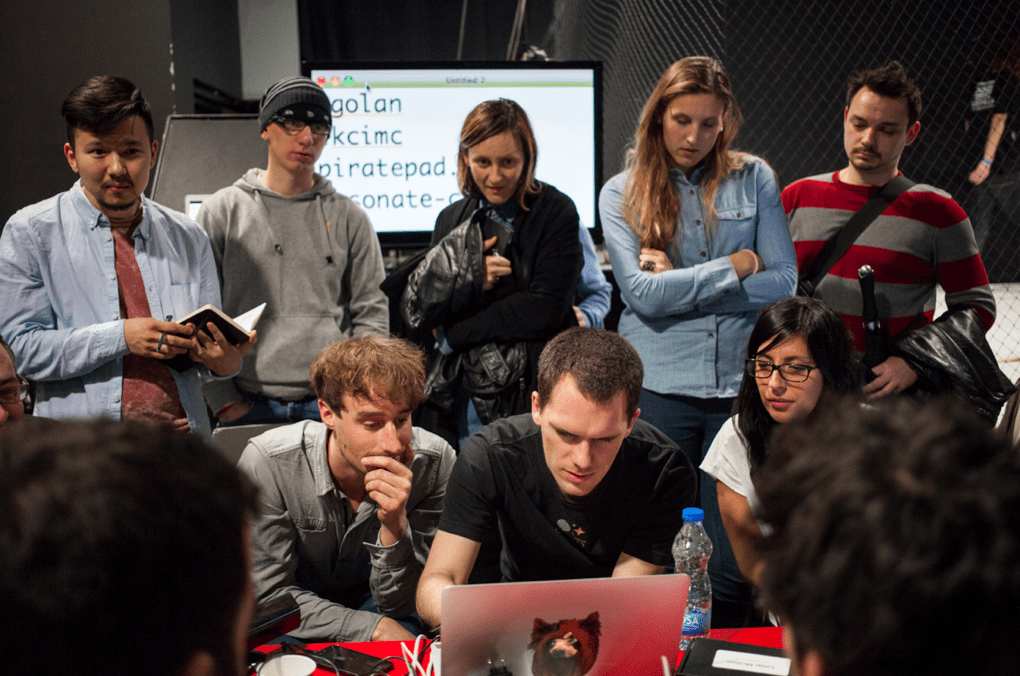
During Resonate 2013 I was lucky to participate in the computer vision workshop (that’s me in the white t-shirt and glasses, smiling). It was run by Kyle McDonald and Golan Levin. Although we got stuff we could test and tinker with, like FaceTracker, for instance, it was more of a Master Class in computer vision. It was a fantastic opportunity to learn so much both historically and practically.
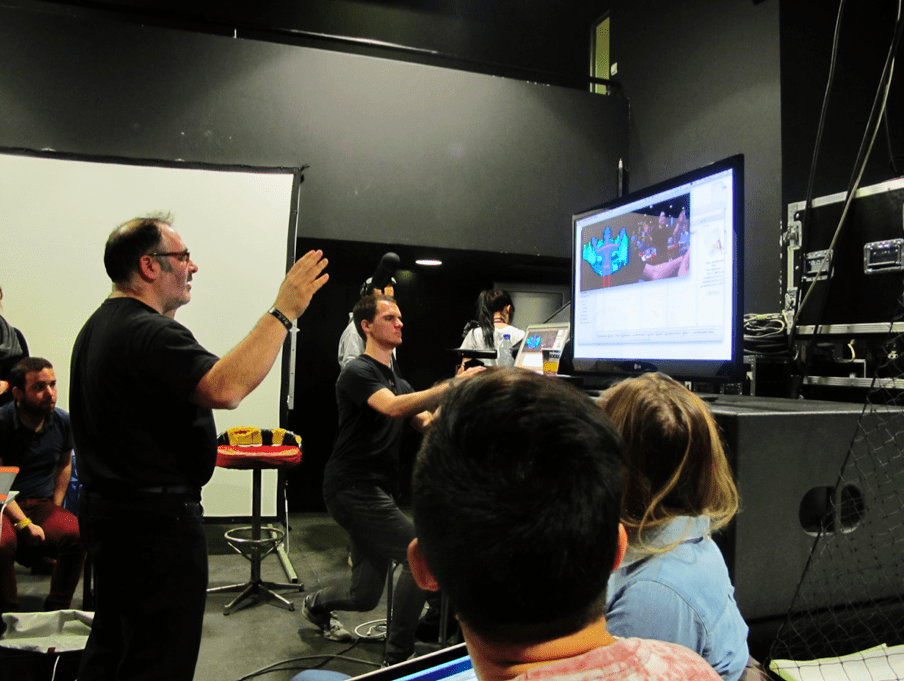
This workshop really helped me make better decisions for my final MA project (an interactive installation), and it was just a pleasure to be around talented guys learning about infrared cameras and how to trick CCTV, among other things. We also had a chance to have a one-on-one consultation, and both Golan and Kyle kindly helped me figure out a technical issue I’ve been struggling with.
Important to know:
- Automatic gain control destroys background subtraction
- Frame differencing
- Brightness tracking is the basic ingredient behind laser tag
- When thresholding, prepare the world for dichotomous decisions, you need to make everything even
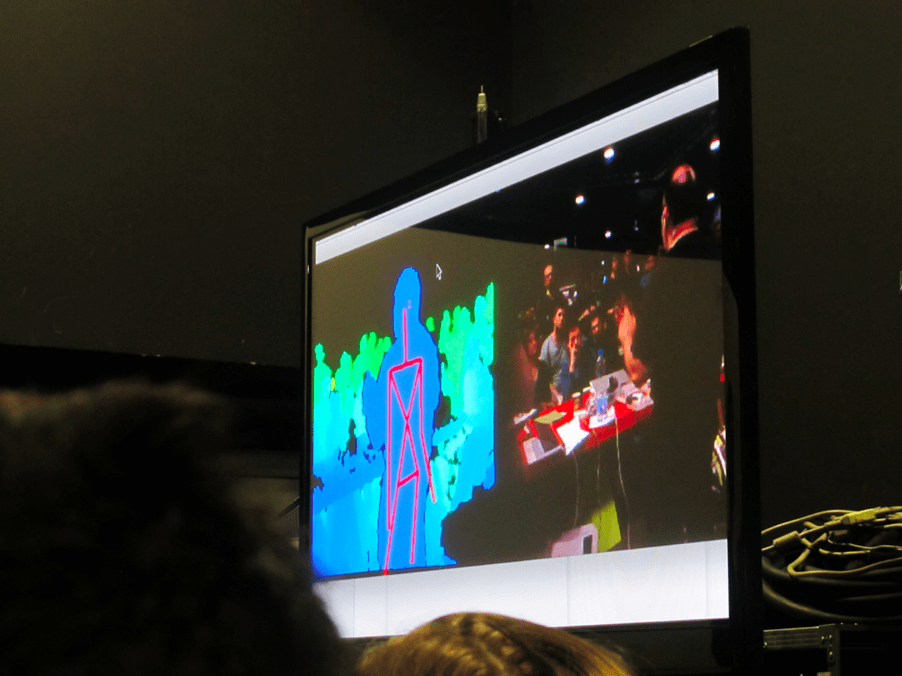
- Difference between near infrared cameras, thermal cameras and depth cameras (kinect)
- Some models of the kinect may not work in some environments, but the older 1414 models do!
- Automatic tresholding
- Work with your environment!
I learned so much at this workshop and loved the vibe during the whole day.






{kind=link}